

|


|


|
Patents
[P1] T. N. Do, M. T. Thai, P. T. Phan, N. Lovell, J. Davies, C. C. Nguyen, "Soft Robotic Arm for In Situ 3D Bioprinting and Surgery ", PCT/AU2024/050038, 2024.
[P2] T. N. Do, M. T. Thai, P. T. Phan, T. T. Hoang, N. Lovell, "Haptic Device", PCT/AU2021/050922, 2021.
[P3] T. N. Do, P. T. Phan, T. T. Hoang, M. T. Thai, N. Lovell, "Soft Robotic Technologies, Artificial Muscles, Grippers And Methods Of Making The Same", PCT/AU2021/050924, 2021.
[P4] Y. Visell, E. Hawkes, T. N. Do, M. Zhu, "Soft Actuator and Method of Making the Same", US Patent, No. 17/275,731 , 2021.
[P5] S. J. Phee, T. N. Do, T. E. T. Seah, K. Y. Ho, "Intragastric Device For Weight Management", European Patent, No. 16839714.9, 2018.
[P6] S. J. Phee, T. N. Do, T. E. T. Seah, K. Y. Ho, "Intragastric Device For Weight Management", China Patent, No. 2016800481507, 2018.
[P7] S. J. Phee, T. N. Do, T. E. T. Seah, K. Y. Ho, "Intragastric Device For Weight Management", US Patent, No. 15/749,437, 2018.
[P8] T. N. Do and Y. Visell, "Stretchable, conductive interconnect and/or sensor and method of making the same", U.S. Patent No. 62/452,758, 2017
[P9] S. J. Phee, T. N. Do, T. E. T. Seah, K. Y. Ho, "Development of a Prototype Magnetically Actuated Weight-Loss Capsule", Singapore Patent, No. 10201506629W, 2015.
[P2] T. N. Do, M. T. Thai, P. T. Phan, T. T. Hoang, N. Lovell, "Haptic Device", PCT/AU2021/050922, 2021.
[P3] T. N. Do, P. T. Phan, T. T. Hoang, M. T. Thai, N. Lovell, "Soft Robotic Technologies, Artificial Muscles, Grippers And Methods Of Making The Same", PCT/AU2021/050924, 2021.
[P4] Y. Visell, E. Hawkes, T. N. Do, M. Zhu, "Soft Actuator and Method of Making the Same", US Patent, No. 17/275,731 , 2021.
[P5] S. J. Phee, T. N. Do, T. E. T. Seah, K. Y. Ho, "Intragastric Device For Weight Management", European Patent, No. 16839714.9, 2018.
[P6] S. J. Phee, T. N. Do, T. E. T. Seah, K. Y. Ho, "Intragastric Device For Weight Management", China Patent, No. 2016800481507, 2018.
[P7] S. J. Phee, T. N. Do, T. E. T. Seah, K. Y. Ho, "Intragastric Device For Weight Management", US Patent, No. 15/749,437, 2018.
[P8] T. N. Do and Y. Visell, "Stretchable, conductive interconnect and/or sensor and method of making the same", U.S. Patent No. 62/452,758, 2017
[P9] S. J. Phee, T. N. Do, T. E. T. Seah, K. Y. Ho, "Development of a Prototype Magnetically Actuated Weight-Loss Capsule", Singapore Patent, No. 10201506629W, 2015.
Book Chapters
[B2] T. E. T. Seah, T. N. Do, N. Takeshita, K. Y. Ho, S. J. Phee, Flexible Robotic Endoscopy System and the Future Ahead, In Wu, George Y., Sridhar, Subbaramiah (Eds.), Diagnostic and Therapeutic Procedures in Gastroenterology, Humana Press, Springer Science+Business Media, 2018, pp. 521-536. PDF
[B1] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Adaptive Tracking Approach of Flexible Cable Conduit-Actuated NOTES Systems for Early Gastric Cancer Treatments", Informatics in Control, Automation and Robotics, In J. Filipe, O. Gusikhin, K. Madani, and J. Sasiadek, Springer International Publishing, Vol. 370, pp. 79-97, 2016. PDF
[B1] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Adaptive Tracking Approach of Flexible Cable Conduit-Actuated NOTES Systems for Early Gastric Cancer Treatments", Informatics in Control, Automation and Robotics, In J. Filipe, O. Gusikhin, K. Madani, and J. Sasiadek, Springer International Publishing, Vol. 370, pp. 79-97, 2016. PDF
International Journal Articles
2024
[J63] T.-A. Truong, X. Huang, A. Ashok, A.A. Abed, R. Almasri, M. N. Shivdasani, M. T. Thai, C. C. Nguyen, X. Zhang, Z. Gu, S. Peng, T. K. Nguyen, T. N. Do, N.-T. Nguyen, H. Zhao, H.-P. Phan, "A flexible electrode array based on a wide bandgap semiconductor for chronic implantable multiplexed sensing and heart pacemakers", ACS Nano, Submitted, 2024
[J62] B. Sharma, P. T. Phan, J. Davies, T. T. Hoang, C. C. Nguyen, A. Ji, K. Zhu, E. Nicotra, N. H. Lovell, T. N. Do, "Soft upper limb wearable robotic devices: technology and applications", Advanced Intelligent Systems, 2024.
[J61] J. J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, P. T. Phan, K. Zhu, B. Sharma, A. Ji, E. Nicoltra, Y. -C. Toh, M. Stevens, C. Hayward, H.-P. Phan, N. H. Lovell, T. N. Do, "Soft Robotic Artificial Left Ventricle Simulator Capable of Reproducing Myocardial Biomechanics", Submitted, 2024.
[J60] C. C. Nguyen, T. T. Hoang, J. Davies, P. T. Phan, M. T. Thai, E. Nicotra, A. Al-Abed, H. A. Tran, T-A. Truong, B. Sharma, A. Ji, K. Zhu, C. H. Wang, H.-P. Phan, N. H. Lovell, T. N. Do, "Soft Fibrous Syringe Architecture for Electricity-Free and Motorless Control of Flexible Robotic Systems", Advanced Science, 2024.
[J59] T. Liu, J. Wang, S. Wong, A. Razjigaev, S. Beier, S. Peng, T. N. Do, S. Song, D. Chu, C. H. Wang, N. H. Lovell, L. Wu . "A Review on the Form and Complexity of Human-Robot Interaction in the Evolution of Autonomous Surgery", Advanced Intelligent Systems, Accepted, 2024. PDF
[J58] T. T. Hoang, A. M. Cunio, S. Zhao, T.-V. Nguyen, S. Peng, S. Liaw, T. Barber, S. Farajikhah, F. Dehghani, T. N. Do, H.-P. Phan, "Flexible, wearable mechano-acoustic sensors for real-time, wireless monitoring of low frequency body sound", Advanced Sensor Research, Accepted, 2024. PDF
[J57] M. X. Chua, Y. Okubo, S. Peng, T. N. Do, C. H. Wang, L. Wu, "Muscle Synergies and Kinematic Analysis of Fatigue-Induced Compensatory Movements in Bicep Curls", IEEE Transactions on Medical Robotics and Bionics, Accepted, 2024. PDF
[J56] T. T. Hoang, C. C. Nguyen, P. T. Phan, J. Davies, H. A. Tran, M. T. Thai, V. K. Truong, T.-K. Nguyen, T. T. V. Doan, H.-P. Phan, N. H. Lovell, T. N. Do, "Shape programmable and multifunctional soft textile muscles for wearable and soft robotics", Advanced Intelligent Systems, Accepted, 2024. PDF
[J55] Y. P. Qiu, A. Ashok, C. C. Nguyen, Y. Yamauchi, T. N. Do, H.-P. Phan, "Integrated sensors and electronics for soft medical robotics", Small, Vol. 20, Issue 22, 2308805. PDF
[J54] M. T. Thai, J. Davies, C. C. Nguyen, P. T. Phan, T. T. Hoang, A. Ji, B. Sharma, E. Nicotra, H. M. La, T.T. Vo-Doan, H.-P. Phan, N. H. Lovell, T. N. Do, Soft Wearable Haptic Display and Flexible 3D Force Sensor for Teleoperated Surgical Systems (Adv. Sensor Res. 1/2024). Advanced Sensor Research, 3(1), p.202470002.
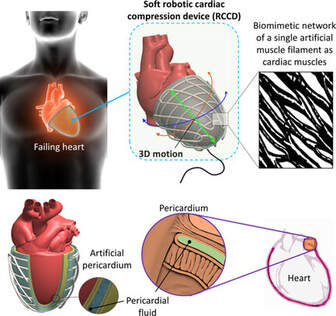
[J53] P. T. Phan, J. Davies, T. T. Hoang, M. T. Thai, C. C. Nguyen, A. Ji, K. Zhu, B. Sharma, E. Nicotra, C. Hayward, H.-P. Phan, N. H. Lovell, T. N. Do, "Robotic Cardiac Compression Device Using Artificial Muscle Filaments for the Treatment of Heart Failure", Advanced Intelligent Systems, Volume 6, Issue 3, 2300464, 2024. PDF
- Featured as Inside Front Cover

|
|
2023
[J52] K. Zhu, P. T. Phan, B. Sharma, J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, A. Ji, E. Nicotra, T.T. Vo-Doan, H.-P. Phan, N. H. Lovell, T. N. Do, "Smart Textile-Driven Soft Exosuit for Spinal Assistance", Sensors, Vol. 23, Issue. 19, P. 8329, 2023. PDF
[J51] M. T. Thai, J. Davies, C. C. Nguyen, P. T. Phan, T. T. Hoang, A. Ji, B. Sharma, E. Nicotra, T.T. Vo-Doan, H.-P. Phan, N. H. Lovell, T. N. Do, "Soft Wearable Haptic Display and Flexible 3D Force Sensor for Teleoperated Surgical Systems", Advanced Sensor Research, Vol. 3, Issue 1, pp. 2300105. 2023. PDF
[J52] K. Zhu, P. T. Phan, B. Sharma, J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, A. Ji, E. Nicotra, T.T. Vo-Doan, H.-P. Phan, N. H. Lovell, T. N. Do, "Smart Textile-Driven Soft Exosuit for Spinal Assistance", Sensors, Vol. 23, Issue. 19, P. 8329, 2023. PDF
[J51] M. T. Thai, J. Davies, C. C. Nguyen, P. T. Phan, T. T. Hoang, A. Ji, B. Sharma, E. Nicotra, T.T. Vo-Doan, H.-P. Phan, N. H. Lovell, T. N. Do, "Soft Wearable Haptic Display and Flexible 3D Force Sensor for Teleoperated Surgical Systems", Advanced Sensor Research, Vol. 3, Issue 1, pp. 2300105. 2023. PDF
- Featured as Inside Front Cover

[J50] P. T. Phan, D. Welch, J. Spiggle, M. T. Thai, T. T. Hoang, J. Davies, C. C. Nguyen, K. Zhu, H.-P. Phan, N. H. Lovell, T. N. Do, "Fabrication, Nonlinear Modelling, and Control of Woven Hydraulic Artificial Muscles for Wearable Applications", Sensors and Actuators A: Physical, Vol. 360, Issue 1, p.114555, 2023. PDF
[J49] S. Zhao, C. C. Nguyen, T. T. Hoang, T. N. Do, H.-P. Phan, "Transparent Pneumatic Tactile Sensors for Soft Biomedical Robotics", Sensors, 23(12), 5671, 2023. PDF
[J48] C. C. Nguyen, T. Teh, M. T. Thai, P. T. Phan, T. T. Hoang, J. Davies, H.-P. Phan, C. H. Wang, N. H. Lovell, T. N. Do, "A Handheld Hydraulic Soft Robotic Device with Bidirectional Bending End-Effector for Minimally Invasive Surgery", IEEE Transactions on Medical Robotics and Bionics, Vol. 5, Issue 3, pp. 590-601, 2023. PDF
[J47] T.-A. Truong, T.-K. Nguyen, X. Huang, A. Ashok, X. Huang, S. Yadav, Y. Park, M. T. Thai, N.-K. Nguyen, H. Fallahi, S. Peng, T.-C. Toh, Y. Yamauchi, C. H. Wang, N. H. Lovell, J. A. Rogers, T. N. Do, N.-T. Nguyen, H. Zhao, H.-P. Phan, "Engineering route for stretchable, three-dimensional microarchitectures of wide bandgap semiconductors for biomedical applications", Advanced Functional Materials, Vol. 33, Issue 34, pp. 2211781, 2023. PDF
- Featured on major international news media such as UNSW Newsroom, Nanowerk, Phys.org, AuManufacturing, Bug, Focus.pl, Innovacao, etc.
- Featured as Inside Back Cover.

[J46] H. A. Tran, T. T. Hoang, A. Maraldo, T. N. Do, D. L. Kaplan, K. S. Lim, J. Rnjak-Kovacina, "Emerging silk materials and their applications: new functionality arising from innovations in silk crosslinking", Materials Today, Vol. 65, p. 244-259 May 2023, PDF
[J45] J. Davies, M. T. Thai, H. Low, P. T. Phan, T. T. Hoang, N. H. Lovell, T. N. Do, "Bio-SHARP: Bio-Inspired Soft and High Aspect Ratio Pump for Robotic and Medical Applications", Soft Robotics, 10(6), pp.1055-1069, 2023. PDF & SI
[J44] C. C. Nguyen, M. T. Thai, T. T. Hoang, J. Davies, P. T. Phan, K. Zhu, L. Wu, M. A. Brodie, D. Tsai, Q. P. Ha, H.-P. Phan, N. H. Lovell, T. N. Do, "Development of A Soft Robotic Catheter for Vascular Intervention Surgery", Sensors and Actuators A: Physical, Vol. 357, pp. 114380, 2023. PDF
[J43] M. T. Thai, P. T. Phan, H. A. Tran, C. C. Nguyen, T. T. Hoang, J. Davies, J. Rnjak-Kovacina, H.-P. Phan, N. H. Lovell, T. N. Do, "Advanced Soft Robotic System for In Situ 3D Bioprinting and Endoscopic Surgery", Advanced Science, Vol. 10, Issue 12, 2205656, 2023. PDF
- Most accessed papers in Advanced Science 08/2022 to present.
- Featured on major international news media such as IEEE Spectrum, New York Post, The Australian, UNSW Newsroom, Dailymail, Engineers Australia, Create Digital, Daily Telegraph, Popular Science (PopSci), Canberra Times, Herald Sun, Courier Mail, Daily Magazine, Interesting Engineering, SBS (starts 5:05), Spotify-Deep Dive: Printing Tech (start 25:00), Medical Xpress, Endadget, New Atlas, MSN, Yahoo!news, Futurism, Wired, Freethink, Medical Republic, UStoday, UK Times, AM Chronicle, Indiatimes, Medical Deisgn & Outsourcing, India News, Surgical Robotics Technology, 3D printing Bootcamp, khoahocphattrien, baomoi, laodong, Asia one, VnEconomy, VNEXPRESS, VTV News, Cafebiz, Lao Động, etc.
- Film & TV: Reuters, Metro, TVP World, South China Morning Post, Straits Times, Amaze Lab, VTV1 12h, VTV1 High Tech Cong Nghe, VTV1 Chao Buoi Sang, HTV 7&9, VTV1, VTV, VTV4 (Người Việt Bốn Phương), VTVCab, Geo TV, Truyền Hình Quốc Hội, Truyền Hình Quốc Hội-tạp Chí Người Việt (18:10), VoV TV, ANTV, Hanoi TV, DW TV (Germany),
- Featured by World Health Organization (WHO) as one of the drivers of future developments in 3D bioprinting and global health (see p3 and refs [5-7])

|
|
|
|
|
|
|
|
|
[J42] C. C. Nguyen, S. Wong, M. T. Thai, T. T. Hoang, P. T. Phan, J. Davies, L. Wu, D. Tsai, H,-P. Phan, N. H. Lovell, T. N. Do, "Teleoperated Surgical Robotic Systems and Their Human-Machine Interfaces", Advanced Sensor Research, Vol. 2, Issue 4, 2200036, 2023, PDF.
[J41] T. N. Do, "Editorial for the Special Issue on Soft Robotics: Design, Fabrication, Modeling, Control and Applications". Micromachines, 14(1):27, 2023.
[J40] O. M. Omisore, T. Akinyemi, W. Du, W. Duan, R. Orji, T. N. Do, L. Wang, "Weighting-based Deep Ensemble Learning for Recognition of Interventionalists' Hand Motions during Robot-assisted Intravascular Catheterization", IEEE Transactions on Human-Machine Systems, Vol. 53, Issue 1, p. 2168-2305, 2023.
- Listed as The Most Accessed in Advanced Sensor Research (2022, 2023)
[J41] T. N. Do, "Editorial for the Special Issue on Soft Robotics: Design, Fabrication, Modeling, Control and Applications". Micromachines, 14(1):27, 2023.
[J40] O. M. Omisore, T. Akinyemi, W. Du, W. Duan, R. Orji, T. N. Do, L. Wang, "Weighting-based Deep Ensemble Learning for Recognition of Interventionalists' Hand Motions during Robot-assisted Intravascular Catheterization", IEEE Transactions on Human-Machine Systems, Vol. 53, Issue 1, p. 2168-2305, 2023.
[J39] J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, P. T. Phan, H.-P.Phan, N. H. Lovell, T. N. Do, "A Stretchable Filament Sensor with Tuneable Sensitivity for Wearable Robotics and Healthcare Applications", Advanced Materials Technologies, Vol. 8, Issue 6, pp. 2201453, 2023. PDF
- Selected as Front Cover
|
|
[J38] L. Wu, F. Yu, T. N. Do, J. Wang, "Camera Frame Misalignment in a Teleoperated Eye-In-Hand Robot: Effects and a Simple Correction Method", IEEE Transactions on Human-Machine Systems, Vol. 53, Issue 1, p. 2-12, 2023.
[J37] A. Ashok, T.-K. Nguyen, M. Barton, M. Leitch, M. K. Masud, H. Park, T. A.-Truong, Y. V. Kaneti, H. T. Ta, X. Li, K. Liang, T. N. Do, C.-H. Wang, N.-T. Nguyen, Y. Yamauchi, and H.-P. Phan, "Flexible Nanoarchitectonics for Biosensing and Physiological Monitoring Applications", Small, Vol. 19, No. 9, pp. 2204946, 2023. PDF
[J37] A. Ashok, T.-K. Nguyen, M. Barton, M. Leitch, M. K. Masud, H. Park, T. A.-Truong, Y. V. Kaneti, H. T. Ta, X. Li, K. Liang, T. N. Do, C.-H. Wang, N.-T. Nguyen, Y. Yamauchi, and H.-P. Phan, "Flexible Nanoarchitectonics for Biosensing and Physiological Monitoring Applications", Small, Vol. 19, No. 9, pp. 2204946, 2023. PDF
- Featured on Technology networks, Australian manufacturing, phys.org, nanowerk, etc.
- Selected as Inside Front Cover

2022
[J36] T. T. Hoang, P. T. Phan, M. T. Thai, J. Davies, C. C. Nguyen, H.-P. Phan, N. H. Lovell, T. N. Do, "Magnetically engineered conductivity of soft liquid metal composites for robotic, wearable electronic, and medical applications", Advanced Intelligent Systems, Vol. 4, Issue. 12, pp. 2200282, 2022.
- Featured on "Hot Topic: Magnetic Materials"
- Selected as Inside Front Cover

|
|
[J35] A. Rizzo, D, Querlioz, L. Sang, W.-T. G. Chen, C. Galasso, T. N. Do, L. Tian, "Inspiring Engineers", Nature Communications Engineering, Vol. 1, Issue 12 (2022). https://doi.org/10.1038/s44172-022-00013-82022.
[J34] T.-K. Nguyen, S. Yadav, T.-A. Truong, M. Han, M. Barton, M. Leitch, P. G. Duran, T. Dinh, A. Ashok, H. Vu, V. Dau, D. Haasmann, L. Chen, Y. Park, T. N. Do, Y. Yamauchi, J. A. Rogers, N.-T. Nguyen, H.-P. Phan, "Integrated, transparent silicon carbide electronics and sensors for radio-frequency biomedical therapy", ACS Nano, 16(7), pp. 10890-10903, 2022. PDF
[J34] T.-K. Nguyen, S. Yadav, T.-A. Truong, M. Han, M. Barton, M. Leitch, P. G. Duran, T. Dinh, A. Ashok, H. Vu, V. Dau, D. Haasmann, L. Chen, Y. Park, T. N. Do, Y. Yamauchi, J. A. Rogers, N.-T. Nguyen, H.-P. Phan, "Integrated, transparent silicon carbide electronics and sensors for radio-frequency biomedical therapy", ACS Nano, 16(7), pp. 10890-10903, 2022. PDF
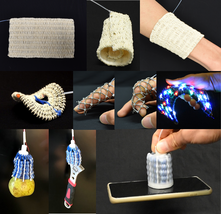
[J33] P. T. Phan, T. T. Hoang, M. T. Thai, J. Davies, C. C. Nguyen, H. -P. Phan, N. H. Lovell, T. N. Do, "Smart Textiles Using Fluid-Driven Artificial Muscle Fibers", Nature Scientific Reports, 12, 11067 (2022).
- Slected as Top 100 Engineering Scientific Reports papers published in 2022
- Featured on The Washington Post, IEEE Spectrum, Engineers Australia, ACM, UNSW Newsroom, Daily Mail, the Spokeman-review, Gizmodo, Dailymotion, Sunday Tribune (printed paper), TechXplore, The West Australia, Yahoo!news, the Manila Times, TodayHeadline, Xinhua, China.org, Newcastleherald, the Islander, medianet, Medium, NATIONTHAILAN, STARTUPtoENTERPRISE, WION, tuoitre.vn, saigongiaiphong, alouc, baomoi, khoa hoc phat trien, Independent Press, etc.
- Film & TV: Thomson Reuters (1), South China Morning Post (1), Tulsa World, Future Now, TVPWorld, Journal Star, Popular Mechanics, ElkoDaily, VTV1, VTV3, THVL, THDT, Truyen Hinh Thong Tan, Truyen Hinh Can Tho, etc.
|
|
|
|
|
[J32] S. Mousavi, M. T. Thai, M. Amjadi, D. Howard, S. Peng, T. N. Do, C. H. Wang, "Unidirectional, Highly Linear Strain Sensors with Thickness Engineered Structure Conductive Films for Precision Control of Soft Machines", Journal of Materials Chemistry A, Volume 10, Issue 26, pp. 13673-13684, 2022. PDF
- Selected as BACK COVER ARTICLE

2021
[J31] T. T. Hoang, L. Sy, M. Bussu, M. T. Thai, H. Low, P. T. Phan, J. Davies, C. C. Nguyen, N. H. Lovell, T. N. Do, "A Wearable Soft Robotic Fabric Sleeve for Upper Limb Augmentation ", Sensors, Vol. 21, Issue 22, p. 1-24, 2021. PDF
[J30] P. T. Phan, T. T. Hoang, M. T. Thai, H. Low, J. Davies, N. H. Lovell, T. N. Do, "Smart Surgical Sutures Using Soft Artificial Muscles", Nature Scientific Reports, 11, 22420 (2021), PDF
[J30] P. T. Phan, T. T. Hoang, M. T. Thai, H. Low, J. Davies, N. H. Lovell, T. N. Do, "Smart Surgical Sutures Using Soft Artificial Muscles", Nature Scientific Reports, 11, 22420 (2021), PDF
- Featured on ENGINEERS AUSTRALIA, AZO Materials, Opera News

|
|
[J29] S. Peng, S. Wu, Y. Yu, Z. Sha, G. Li, T. T. Hoang, M. T. Thai, T. N. Do, D. Chu, and C. H. Wang, "Carbon Nanofiber Reinforced Strain Sensors with High Breathability and Anisotropic Sensitivity", Journal of Materials Chemistry A, 2, Vol. 9, Issue 47, pp. 26788-26799, 2021, PDF
[J28] M. T. Thai, P.T. Phan, T. T. Hoang, H. Low, N. Lovell, T. N. Do, "Correction to "Design, Fabrication, Hysteresis Modeling of Soft Microtubule Artificial Muscle (SMAM) for Medical Applications"", IEEE Robotics and Automation Letters, Vol. 6, Issue 4, pp. 8409 - 8409, 2021.
[J27] P.T. Phan, T. T. Hoang, M. T. Thai, H. Low, N. Lovell, T. N. Do, "Twisting and Braiding Fluid-Driven Soft Artificial Muscle Fibers for Robotic Applications", Soft Robotics, Vol. 9, Issue. 4, pp. 820-836, 2021, DOI: 10.1089/soro.2021.0040, PDF
- Featured on UNSW Newsroom, IEEE Spectrum, Gizmodo, Daily Mail, the Spokeman-review, Dailymotion, Sunday Tribune (printed paper), TechXplore, The West Australia, Yahoo!news, the Manila Times, TodayHeadline, Xinhua, China.org, Newcastleherald, the Islander, medianet, Medium, tuoitre.vn, etc.

|
|
[J26] N.-K. Nguyen, T. Nguyen, T.-K. Nguyen, S. Yadav, T. Dinh, M.K. Masud, P. Singha, T.N. Do, M.J. Barton, H. Ta, K. Navid, C.H. Ooi, N.-T. Nguyen, H.-P. Phan. "Wide-bandgap semiconductors for biointegrated electronics: recent advances and future directions", ACS Appl. Electron. Mater., Vol. 3, Issue 5, pp. 1959-1981, 2021. PDF
- Selected as Cover Article
[J25] M. T. Thai, P.T. Phan, T. T. Hoang, H. Low, N. Lovell, T. N. Do, "Design, Fabrication, Hysteresis Modeling of Soft Microtubule Artificial Muscle (SMAM) for Medical Applications", IEEE Robotics and Automation Letters, Vol. 6, Issue 3, pp. 5089-5096, 2021. PDF
[J24] T. T. Hoang, J. J. S. Quek, M. T. Thai, P.T. Phan, N. Lovell, T. N. Do, "Soft Robotic Fabric Gripper with Gecko Adhesion and Variable Stiffness ", Sensors and Actuators A: Physical, Vol. 323, pp. 12673, 2021, PDF
2020
[J23] P.T. Phan, M. T. Thai, T. T. Hoang, N. Lovell, T. N. Do, "HFAM: Soft Hydraulic Filament Artificial Muscles for Flexible Robotic Applications ", IEEE Access, Vol. 8, pp. 226637 - 226652, 2020.
[J22] T. T. Hoang, P.T. Phan, M. T. Thai, N. Lovell, T. N. Do, "Bio-inspired Conformable and Helical Soft Fabric Gripper with Variable Stiffness and Touch Sensing", Advanced Materials Technologies, Vol. 5, Issue 12, 2020. PDF.
[J22] T. T. Hoang, P.T. Phan, M. T. Thai, N. Lovell, T. N. Do, "Bio-inspired Conformable and Helical Soft Fabric Gripper with Variable Stiffness and Touch Sensing", Advanced Materials Technologies, Vol. 5, Issue 12, 2020. PDF.
- Featured on IEEE Spectrum, UNSW Newsroom, Advanced Science News, The American Society of Mechanical Engineers (ASME), Engineers Australia, Gizmodo, Futurism, CNET, Engadget, EurekAlert!, NEW ATLAS, ScienceDaily, Microsoft News, YAHOO! News, phys.org, ABC News, Tech Xplore, COSMOS Magazine, nano werk, BIG THINK, asknature.org, etc.
- Editor's pick and selected in the "The Best of Advanced Materials Technologies 2020"
- Featured on the Ranger Rick Magazines as teaching material powered by the US National Wildlife Federation.
|
|
[J21] M. T. Thai, T. T. Hoang, P.T. Phan, N. Lovell, T. N. Do, "Soft Microtubule Muscle-Driven 3-Axis Skin-Stretch Haptic Devices", IEEE Access, Vol. 8, pp. 157878-157891, 2020, PDF.
- Featured on UNSW Newsroom, Daily Telegraph, Science News for Student (20-Nov-2020 & 25-May-2021), Tech Briefs, EurekAlert!, ScienceDaily, NEW ATLAS, Phys.org, Tech Xplore, Reddit, ZDNet, Technology Networks, News Break, etc.
- TV Broadcast by 10 News First, Channel 10 & UNTV
|
|
|
[J20] M. T. Thai, P.T. Phan, T. T. Hoang, S. Wong, N. Lovell, T. N. Do "Advanced Intelligent Systems for Surgical Robotics", Advanced Intelligent Systems, Vol. 2, Issue 8, 2020, PDF.
[J19] M. Zhu, T. N. Do, E. W. Hawkes, and Y. Visell, "Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics" Soft Robotics, Vol. 7, No. 2, pp. 179-197, 2020. PDF
[J20] M. T. Thai, P.T. Phan, T. T. Hoang, S. Wong, N. Lovell, T. N. Do "Advanced Intelligent Systems for Surgical Robotics", Advanced Intelligent Systems, Vol. 2, Issue 8, 2020, PDF.
- Listed as The Most Accessed in Advanced Intelligent Systems (2019, 2020, 2021)
- Listed as Top 10 Most Downloaded Papers! (2019-2021)
- Featured on Surgical Robotics Technologies & The Sheekey Science Show
[J19] M. Zhu, T. N. Do, E. W. Hawkes, and Y. Visell, "Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics" Soft Robotics, Vol. 7, No. 2, pp. 179-197, 2020. PDF
- Selected as Front Cover Article
- Listed as Top cited paper from Soft Robotics journal, 2020!
|

|
2018
[J18] T. N. Do, Hung Phan, Thuc-Quyen Nguyen, and Y. Visell, "Soft Electromagnetic Actuators: Miniature Soft Electromagnetic Actuators for Robotic Applications (Adv. Funct. Mater. 18/2018). Advanced Functional Materials, 28: 1870116. doi:10.1002/adfm.201870116 PDF
[J17] H. M. Le, C. Lin, T. N. Do, S. J. Phee, "Design and Modeling of a Variable Stiffness Structure for Surgical Robotic Application", Mechatronics, Vol. 53, pp. 109-123, 2018, PDF
[J16] T. N. Do, Hung Phan, Thuc-Quyen Nguyen, and Y. Visell, "Miniature Soft Electromagnetic Actuators for Robotic Applications", Advanced Functional Materials, Vol. 28, Issue 18, 1800244, 2018. PDF & SI
[J17] H. M. Le, C. Lin, T. N. Do, S. J. Phee, "Design and Modeling of a Variable Stiffness Structure for Surgical Robotic Application", Mechatronics, Vol. 53, pp. 109-123, 2018, PDF
[J16] T. N. Do, Hung Phan, Thuc-Quyen Nguyen, and Y. Visell, "Miniature Soft Electromagnetic Actuators for Robotic Applications", Advanced Functional Materials, Vol. 28, Issue 18, 1800244, 2018. PDF & SI
- Selected as Front Cover Article
- Featured on Advanced Science News, Science Daily, EurekAlert!, TechXplore, etc.

[J15] T. N. Do and Y. Visell, "Highly Stretchable, Twisted Conductive Microtubules for Robotics, Electronics, and Healthcare Application", Nature Scientific Reports, 7: 1753, 2017. PDF
[J14] T. N. Do, T. E. T. Seah, K. H. Yu, S. J. Phee, "A Magnetic Soft Endoscopic Capsule-Inflated Intragastric Balloon for Weight Management", Nature Scientific Reports, 6: 39486, 2016. PDF & SI
[J13] H. M. Le, T. N. Do, S. J. Phee, "A Survey on Actuators-Driven Surgical Robots", Sensors and Actuators A: Physical, Vol. 247, pp. 323-354, 2016. PDF
[J12] T. N. Do, T. E. T. Seah, K. H. Yu, S. J. Phee, "Correction: Development and Testing of a Magnetically Actuated Capsule Endoscopy for Obesity Treatment", PLoS ONE, 11(3): e0151711, 2016. PDF
[J11] T. N. Do, T. E. T. Seah, K. Y. Ho, S. J. Phee, "Development and Testing of a Magnetically Actuated Capsule Endoscopy for Obesity Treatment", PLoS ONE, 11(1): e0148035, 2016. PDF
- Featured on AsianScientist, Medgadget, Medical Health News, etc.
[J10] T. N. Do, T.E.T. Seah, S. J. Phee, "Design and Control of a Mechatronic Tracheostomy Tube for Automated Tracheal Suctioning", IEEE Trans on Biomedical Engineering, Vol. 63, Issue 6, pp. 1229-1238, 2016. PDF
[J9] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Position Control of Asymmetric Nonlinearities for a Cable-Conduit Mechanism", IEEE Trans on Automation Science and Engineering, 14 (3), 1515-1523, 2017. PDF
[J8] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Real-Time Enhancement of Tracking Performances for Cable-Conduit Mechanisms-Driven Flexible Robots", Robotics and Computer-Integrated Manufacturing, 2016, Vol. 37, pp.197-207. PDF
[J7] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Adaptive Control for Enhancing Tracking Performances of Flexible Tendon-Sheath Mechanism in Natural Orifice Transluminal Endoscopic Surgery (NOTES)", Mechatronics, Vol. 28, Issue 2015, pp. 67-78, 2015. PDF
[J6] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Nonlinear Friction Modeling and Compensation Control of Hysteresis Phenomena for a Pair of Tendon-Sheath Actuated Surgical Robots", Mechanical Systems and Signal Processing, Vol. 60-61, pp. 770-784, 2015. PDF
[J5] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "A Novel Approach of Friction Model for Tendon-Sheath Actuated Surgical Systems: Nonlinear Modeling and Parameter Identification", Mechanism and Machine Theory, Vol. 85, pp. 14-24, 2015. PDF
[J4] V. Hassani, T. Tjahjowidodo, T. N. Do, "A Survey on Hysteresis Modeling, Identification and Control", Mechanical Systems and Signal Processing, 2014, Vol. 49, No. 1-2, 209-233. PDF
[J3] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Dynamic Friction-Based Force Feedback for Tendon-Sheath Mechanism in NOTES System", International Journal of Computer and Electrical Engineering, 2014, Vol. 6, No.3, 252-258. PDF
[J2] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, T. Yamamoto, S. J. Phee, "Hysteresis Modeling and Position Control of Tendon-Sheath Mechanism in Flexible Endoscopic Systems", Mechatronics, 24 (2013) 12-22. PDF
[J1] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "An Investigation of Friction-Based Tendon-Sheath Model Appropriate for Control Purposes", Mechanical Systems and Signal Processing, 42 (2014) 97-114. PDF
TV Program
- Sully, S., Pead, S., Street, G., Nho Do, T. and Lovell, N. (2020), ‘Modern medicine: Doctors are treating people remotely more and more using virtual technology.’, 10 News First. Network 10, 2020(1012). https://search.informit.org/doi/10.3316/TVNEWS.TSM202010120164.
International Conferences
[C21] A. Nguyen, C. Le, P. Walunj, T. N. Do, A. Netchaev, H., "A Multi-model Fusion of LiDAR-inertial Odometry via Localization and Mapping", the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, 2024 . Accepted PDF
[C20] E. Nicotra, C. C. Nguyen, J. Davies, P. T. Phan, T. T. Hoang, B. Sharma, K. Zhu, T. D. ngo, V. A. Ho, H. M. La, N. H. Lovell, T. N. Do, "A Soft Micro-Robotic Catheter for Aneurysm Treatment: A New Design and Enhanced Euler-Bernoulli Model with Cross-Section Optimization", IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024. Accepted PDF
[C19] N. H. Nguyen, T. N. Do, V. A. Ho, "A Preliminary Study of a Soft Artificial Pump based on ROBIN-Rotation-based Buckling Instability Analysis", The 2024 16th IEEE/SICE International Symposium on System Integration Ha Long, Vietnam 8-11th January, pp. 245-250, 2024, PDF
[C18] K. Zhu, B. Sharma, P. T. Phan, J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, A. Ji, E. Nicotra, N. H. Lovell, T. N. Do, "Development of a Smart Textile-Driven Soft Spine Exosuit for Lifting Tasks in Industrial Applications", The 2024 16th IEEE/SICE International Symposium on System Integration Ha Long, Vietnam 8-11th January, pp. 13-18, 2024, PDF
[C17] A. Woods, C. C. Nguyen, N. H. Lovell, T. N. Do, D. Tsai, "Towards a Single-Use, Low-Cost Endoscope for Gastroenterological Diagnosis", The 45th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Sydney, Australia, pp. 1-4, 2023. PDF
[C16] C. C. Nguyen, J. Davies, M. T. Thai, T. T. Hoang, P. T. Phan, K. Zhu, D. B. N. Tran, V. A. Ho, H. M. La, H.-P. Phan, N. H. Lovell, T. N. Do, "A Handheld Hydraulic Cardiac Catheter with Omnidirectional Manipulator and Touch Sensing", IEEE International Conference on Robotics and Automation (ICRA), London, UK, pp. 4682-4688, 2023. PDF
[C15] J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, P. T. Phan, K. Zhu, D. B. N. Tran, V. A. Ho, H. M. La, Q. P. Ha, N. H. Lovell, T. N. Do, "A Flexible 3D Force Sensor with Tunable Sensitivity", IEEE International Conference on Robotics and Automation (ICRA), London, UK, pp. 581-587, 2023. PDF
[C14] C. C. Nguyen, T. Teh, M. T. Thai, P. T. Phan, T. T. Hoang, H. Low, J. Davies, E. Nicotra, N. H. Lovell, T. N. Do, "Bidirectional Soft Hydraulic Catheter for Arrhythmia Treatment", IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA, pp. 9579-9585, 2022. PDF
[C13] J. Davies, P. T. Phan, D. Huang, T. T. Hoang, H. Low, M. T. Thai, C. C. Nguyen, E. Nicotra, N. H. Lovell, T. N. Do, "Hydraulically Actuated Soft Tubular Gripper", IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA, pp. 6144-6150, 2022. PDF
[C12] O. M. Omisore, W. Du, W. Duan, T. N. Do, R. Orji, L. Wang, "A Deep Multimodal Network for Classification and Identification of Interventionists’ Hand Motions during Cyborg Intravascular Catheterization", 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, pp. 1182-1187, 2021. PDF
[C11] L. Sy, T. T. Hoang, M. Bussu, M. T. Thai, P. T. Phan, H. Low, D. Tsai, M. A. Brodie, N. H. Lovell, T. N. Do, "M-SAM: Miniature and Soft Artificial Muscle-Driven Wearable Robotic Fabric Sleeve for Upper Limb Augmentation", The 4th IEEE International Conference on Soft Robotics (Robosoft 2021), Yale, USA, pp. 575-578, 2021. PDF
[C10] H. M. Le, T. N. Do, C. Lin, S. J. Phee, "Towards Active Variable Stiffness Manipulator for Surgical Robots ", The 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 2017, pp. 1766-1771.
[C9] T. N. Do, P. T. Phan, K. Y. Ho, S. J. Phee, "A Magnetic Soft Endoscopic Capsule for Non-Surgical Overweight and Obese Treatment", The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Deajeon, Korea, 2016. pp 2388-2393.
[C8] T. N. Do, S. J. Phee, "Enhancement of Haptic Feedback in Natural Orifice Transluminal Endoscopic Surgery (NOTES)", the National Conference on Machines and Mechanisms, Ho Chi Minh City, Vietnam, 2015.
[C7] T. N. Do, T.E.T. Seah, S. J. Phee, "Design and Control of a Novel Mechatronic Tracheostomy Tube-Inserted Suction Catheter for Automated Tracheal Suctioning", the 7th IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and the 7th IEEE International Conference on Robotics, Automation and Mechatronics (RAM) (CIS-RAM), Angkor Wat, Cambodia, 2015, pp. 228-233.
[C6] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Enhanced Performances for Cable-Conduit-Driven Flexible Robotic Systems with Asymmetric Backlash Profile", the 7th Annual IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Greater Boston Area, Massachusetts, USA, 2015, pp. 1-6.
[C5] T. L. Nguyen, T. N. Do, M. W. S. Lau, S. J. Phee, "Modelling, Design, and Control of a Robotic Running Foot for Footwear Testing with Flexible Actuator", the 1th International Conference in Sports Science & Technology (ICSST), Singapore, 2014, pp. 505-514.
[C4] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Adaptive Control of Position Compensation for Cable-Conduit Mechanisms Used In Flexible Surgical Robots", the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Vienna, Austria, 2014, pp. 110-117.
[C3] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Dynamic Friction-Based Force Feedback for Tendon-Sheath Mechanism in NOTES System", 2nd International Conference on Electronics Engineering and Technology, Dubai, UAE, 2014, pp. 252-258.
[C2] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Dynamic Friction Model for Tendon-Sheath Actuated Surgical Robot: Modeling and Stability Analysis", Proc. of the 3rd IFToMM International Symposium on Robotics and Mechatronics (ISRM 2013), Singapore, 2013, pp. 302-311.
[C1] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Nonlinear Modeling and Parameter Identification of Dynamic Friction Model in Tendon Sheath for Flexible Endoscopic Systems", the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Reykjavik, Iceland, 2013, pp. 5-10.
[C20] E. Nicotra, C. C. Nguyen, J. Davies, P. T. Phan, T. T. Hoang, B. Sharma, K. Zhu, T. D. ngo, V. A. Ho, H. M. La, N. H. Lovell, T. N. Do, "A Soft Micro-Robotic Catheter for Aneurysm Treatment: A New Design and Enhanced Euler-Bernoulli Model with Cross-Section Optimization", IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024. Accepted PDF
[C19] N. H. Nguyen, T. N. Do, V. A. Ho, "A Preliminary Study of a Soft Artificial Pump based on ROBIN-Rotation-based Buckling Instability Analysis", The 2024 16th IEEE/SICE International Symposium on System Integration Ha Long, Vietnam 8-11th January, pp. 245-250, 2024, PDF
[C18] K. Zhu, B. Sharma, P. T. Phan, J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, A. Ji, E. Nicotra, N. H. Lovell, T. N. Do, "Development of a Smart Textile-Driven Soft Spine Exosuit for Lifting Tasks in Industrial Applications", The 2024 16th IEEE/SICE International Symposium on System Integration Ha Long, Vietnam 8-11th January, pp. 13-18, 2024, PDF
[C17] A. Woods, C. C. Nguyen, N. H. Lovell, T. N. Do, D. Tsai, "Towards a Single-Use, Low-Cost Endoscope for Gastroenterological Diagnosis", The 45th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Sydney, Australia, pp. 1-4, 2023. PDF
[C16] C. C. Nguyen, J. Davies, M. T. Thai, T. T. Hoang, P. T. Phan, K. Zhu, D. B. N. Tran, V. A. Ho, H. M. La, H.-P. Phan, N. H. Lovell, T. N. Do, "A Handheld Hydraulic Cardiac Catheter with Omnidirectional Manipulator and Touch Sensing", IEEE International Conference on Robotics and Automation (ICRA), London, UK, pp. 4682-4688, 2023. PDF
[C15] J. Davies, M. T. Thai, T. T. Hoang, C. C. Nguyen, P. T. Phan, K. Zhu, D. B. N. Tran, V. A. Ho, H. M. La, Q. P. Ha, N. H. Lovell, T. N. Do, "A Flexible 3D Force Sensor with Tunable Sensitivity", IEEE International Conference on Robotics and Automation (ICRA), London, UK, pp. 581-587, 2023. PDF
[C14] C. C. Nguyen, T. Teh, M. T. Thai, P. T. Phan, T. T. Hoang, H. Low, J. Davies, E. Nicotra, N. H. Lovell, T. N. Do, "Bidirectional Soft Hydraulic Catheter for Arrhythmia Treatment", IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA, pp. 9579-9585, 2022. PDF
[C13] J. Davies, P. T. Phan, D. Huang, T. T. Hoang, H. Low, M. T. Thai, C. C. Nguyen, E. Nicotra, N. H. Lovell, T. N. Do, "Hydraulically Actuated Soft Tubular Gripper", IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA, pp. 6144-6150, 2022. PDF
[C12] O. M. Omisore, W. Du, W. Duan, T. N. Do, R. Orji, L. Wang, "A Deep Multimodal Network for Classification and Identification of Interventionists’ Hand Motions during Cyborg Intravascular Catheterization", 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, pp. 1182-1187, 2021. PDF
[C11] L. Sy, T. T. Hoang, M. Bussu, M. T. Thai, P. T. Phan, H. Low, D. Tsai, M. A. Brodie, N. H. Lovell, T. N. Do, "M-SAM: Miniature and Soft Artificial Muscle-Driven Wearable Robotic Fabric Sleeve for Upper Limb Augmentation", The 4th IEEE International Conference on Soft Robotics (Robosoft 2021), Yale, USA, pp. 575-578, 2021. PDF
[C10] H. M. Le, T. N. Do, C. Lin, S. J. Phee, "Towards Active Variable Stiffness Manipulator for Surgical Robots ", The 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 2017, pp. 1766-1771.
[C9] T. N. Do, P. T. Phan, K. Y. Ho, S. J. Phee, "A Magnetic Soft Endoscopic Capsule for Non-Surgical Overweight and Obese Treatment", The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Deajeon, Korea, 2016. pp 2388-2393.
[C8] T. N. Do, S. J. Phee, "Enhancement of Haptic Feedback in Natural Orifice Transluminal Endoscopic Surgery (NOTES)", the National Conference on Machines and Mechanisms, Ho Chi Minh City, Vietnam, 2015.
[C7] T. N. Do, T.E.T. Seah, S. J. Phee, "Design and Control of a Novel Mechatronic Tracheostomy Tube-Inserted Suction Catheter for Automated Tracheal Suctioning", the 7th IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and the 7th IEEE International Conference on Robotics, Automation and Mechatronics (RAM) (CIS-RAM), Angkor Wat, Cambodia, 2015, pp. 228-233.
[C6] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Enhanced Performances for Cable-Conduit-Driven Flexible Robotic Systems with Asymmetric Backlash Profile", the 7th Annual IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Greater Boston Area, Massachusetts, USA, 2015, pp. 1-6.
[C5] T. L. Nguyen, T. N. Do, M. W. S. Lau, S. J. Phee, "Modelling, Design, and Control of a Robotic Running Foot for Footwear Testing with Flexible Actuator", the 1th International Conference in Sports Science & Technology (ICSST), Singapore, 2014, pp. 505-514.
[C4] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Adaptive Control of Position Compensation for Cable-Conduit Mechanisms Used In Flexible Surgical Robots", the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Vienna, Austria, 2014, pp. 110-117.
[C3] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Dynamic Friction-Based Force Feedback for Tendon-Sheath Mechanism in NOTES System", 2nd International Conference on Electronics Engineering and Technology, Dubai, UAE, 2014, pp. 252-258.
[C2] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Dynamic Friction Model for Tendon-Sheath Actuated Surgical Robot: Modeling and Stability Analysis", Proc. of the 3rd IFToMM International Symposium on Robotics and Mechatronics (ISRM 2013), Singapore, 2013, pp. 302-311.
[C1] T. N. Do, T. Tjahjowidodo, M. W. S. Lau, S. J. Phee, "Nonlinear Modeling and Parameter Identification of Dynamic Friction Model in Tendon Sheath for Flexible Endoscopic Systems", the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Reykjavik, Iceland, 2013, pp. 5-10.
Disclaimer
The above papers are intended for private viewing by the page owner or those who otherwise have legitimate access to them. No part of it may in any electronic, mechanical, photocopying, recording, or any other means be reproduced, stored in a retrieval system or be broadcast or transmitted without the prior permission of the respective publishers. If the viewers have valid subscription of these above papers, please click on the corresponding link to get legitimate copies.
The above papers are intended for private viewing by the page owner or those who otherwise have legitimate access to them. No part of it may in any electronic, mechanical, photocopying, recording, or any other means be reproduced, stored in a retrieval system or be broadcast or transmitted without the prior permission of the respective publishers. If the viewers have valid subscription of these above papers, please click on the corresponding link to get legitimate copies.

